About
I am currently a graduate research assistant at the CRAFT Lab, Northeastern University, advised by Prof. Gilbert Yang Ye. My research focuses on safe, physically-grounded robot manipulation — building learned policies that respect safety constraints and genuinely exploit the sensory inputs they are given.
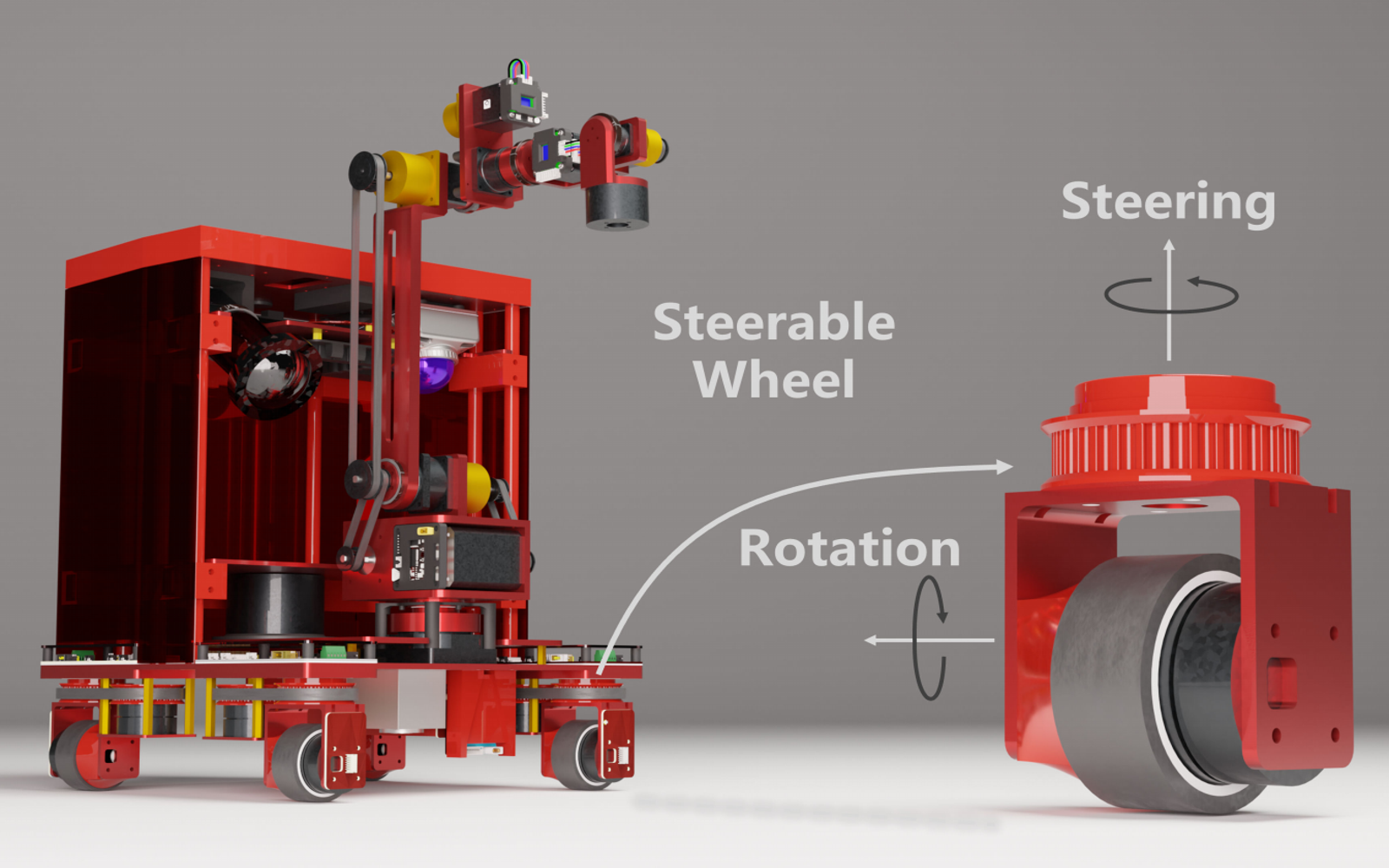
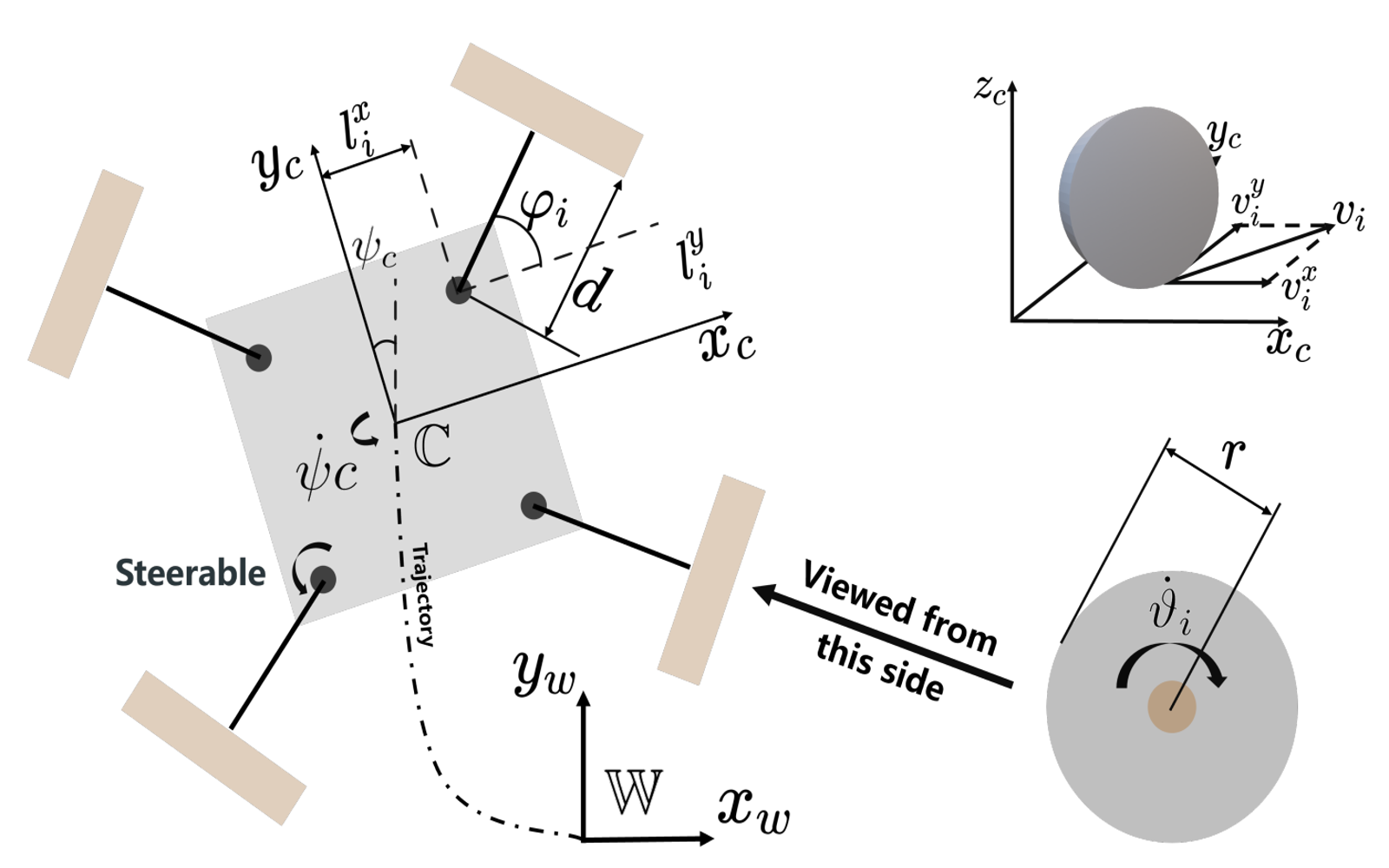
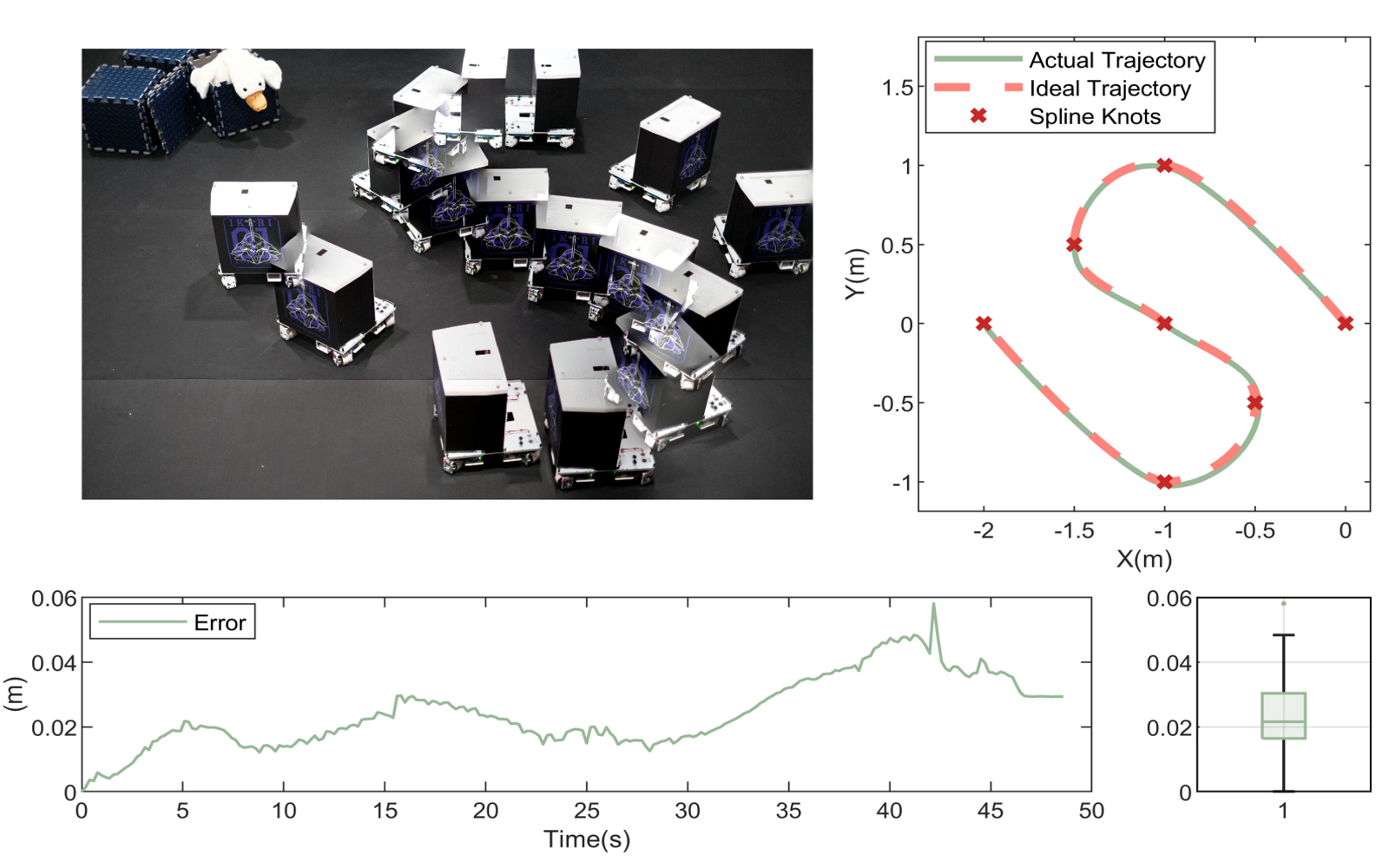
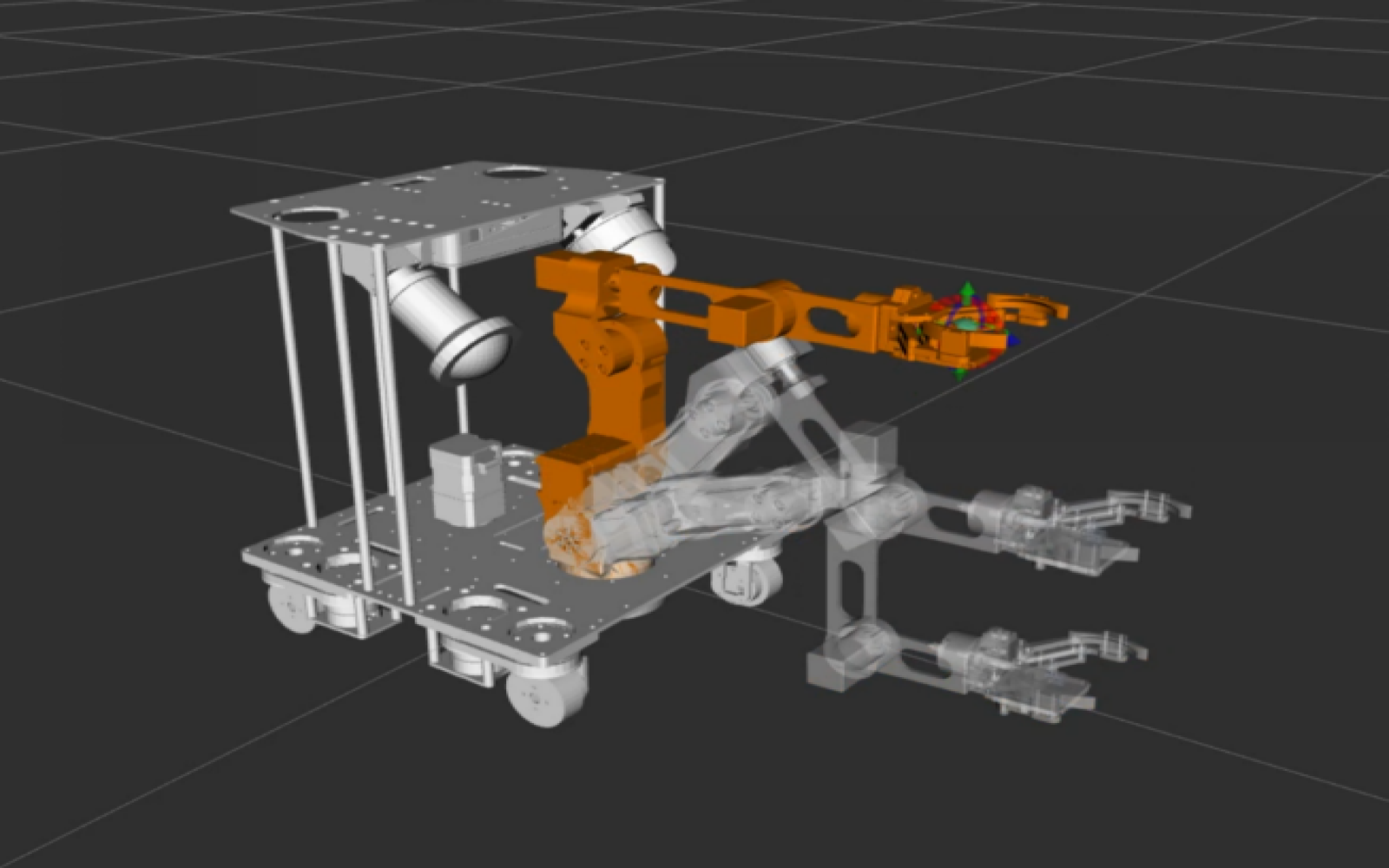
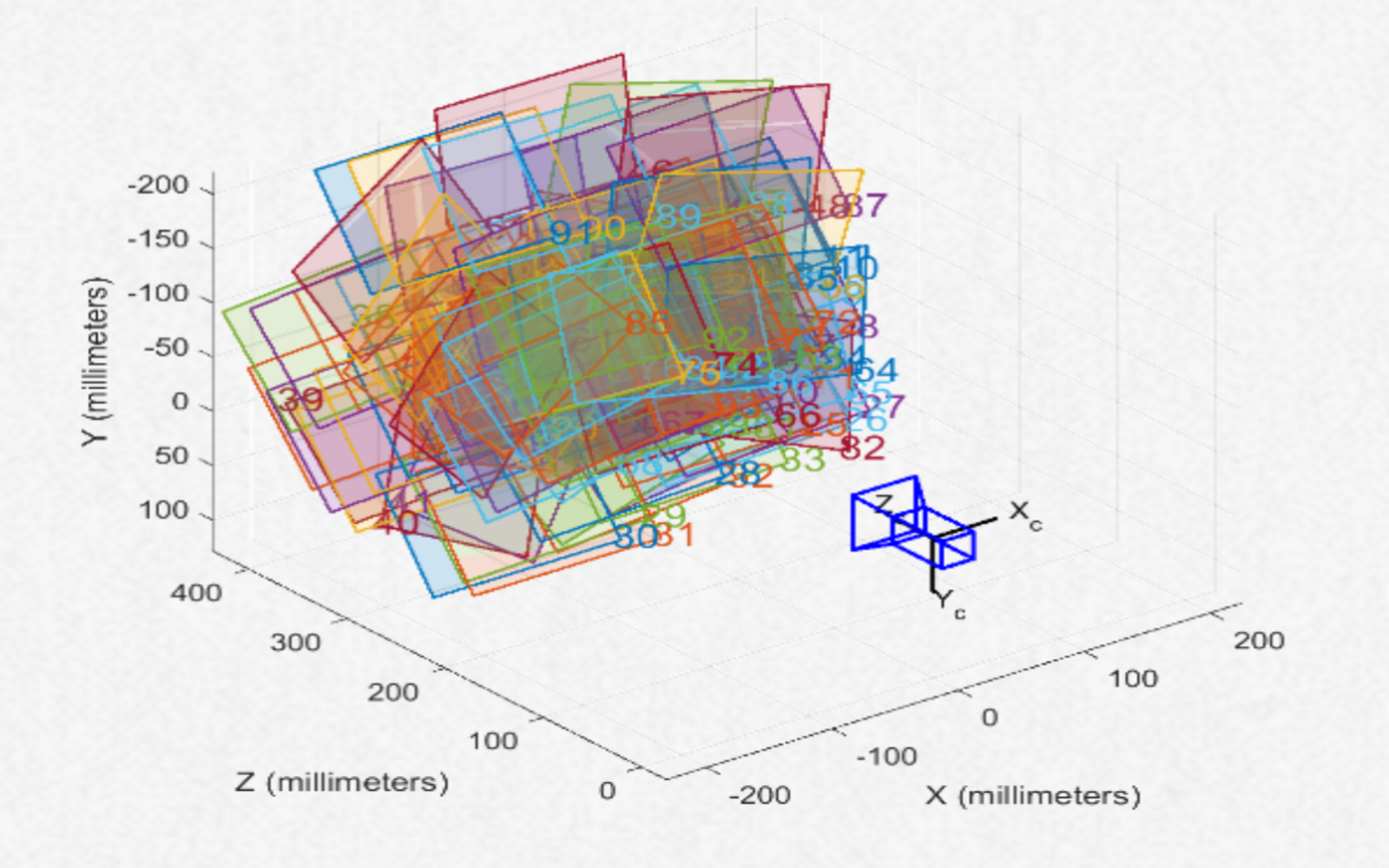
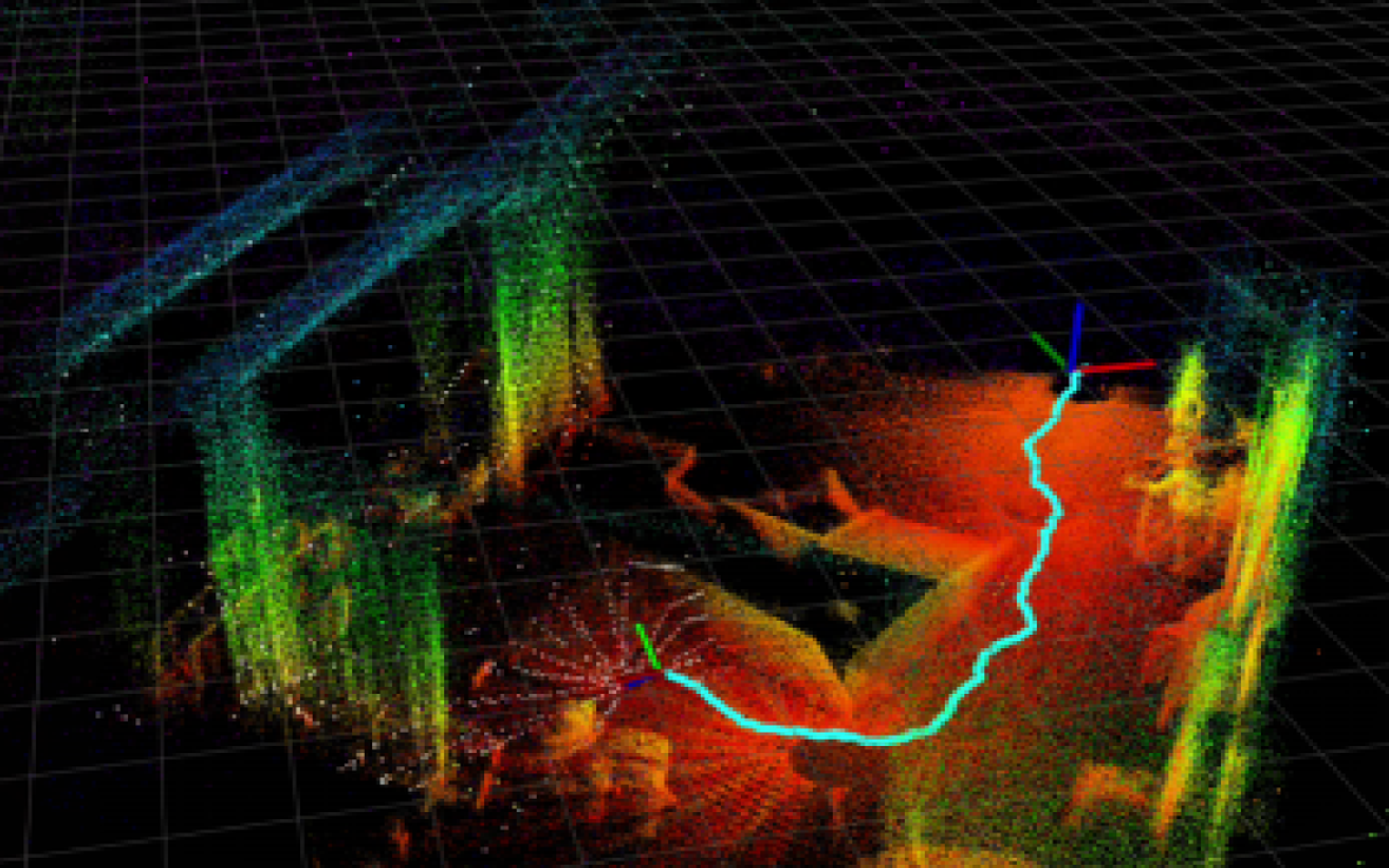
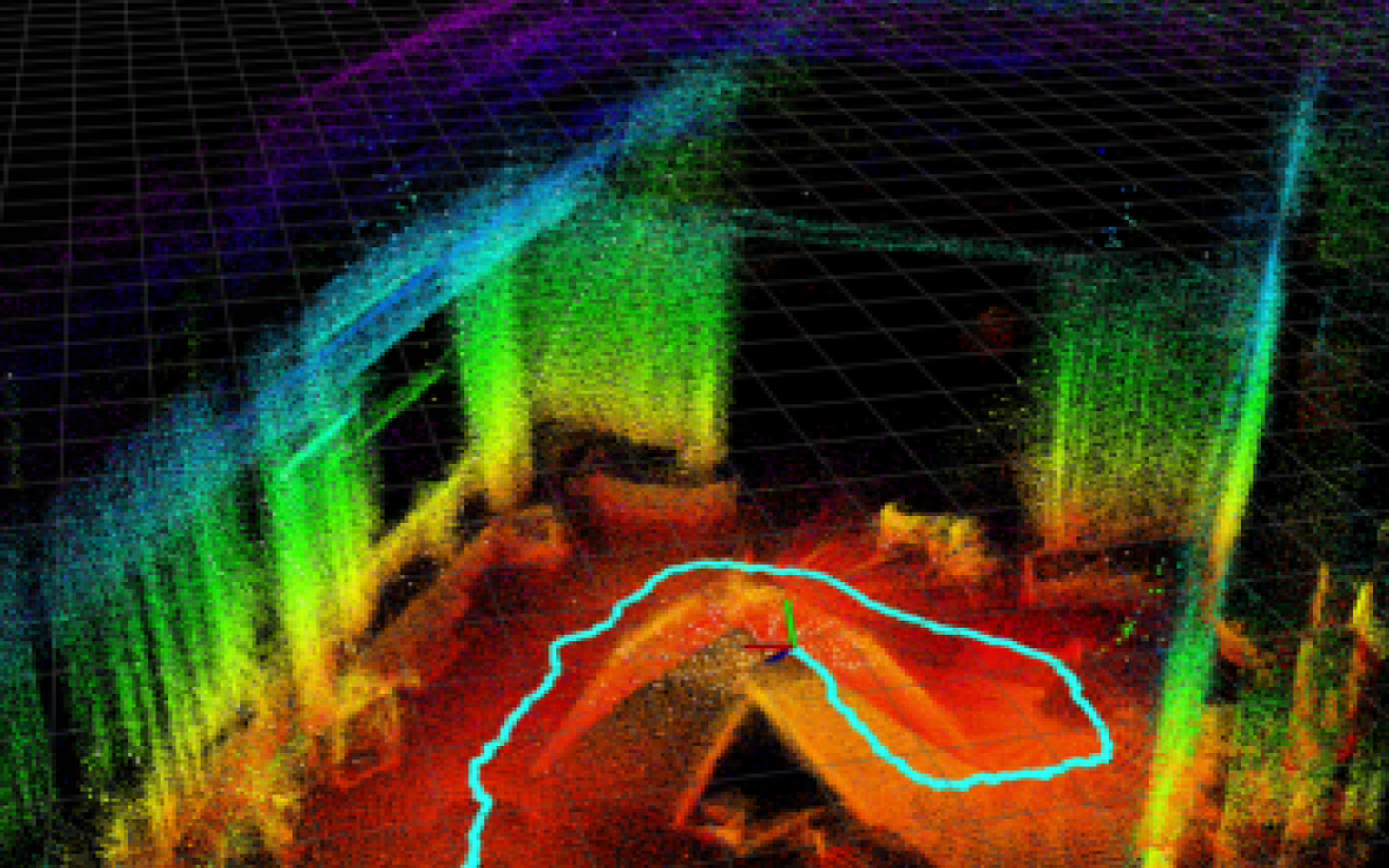
Before joining CRAFT Lab, I worked as a research assistant at SJTU IWIN-FINS Lab advised by Prof. Jianping He, where I co-designed the full-stack Fines robotic platform, covering hardware architecture, embedded control framework, and perception pipeline.
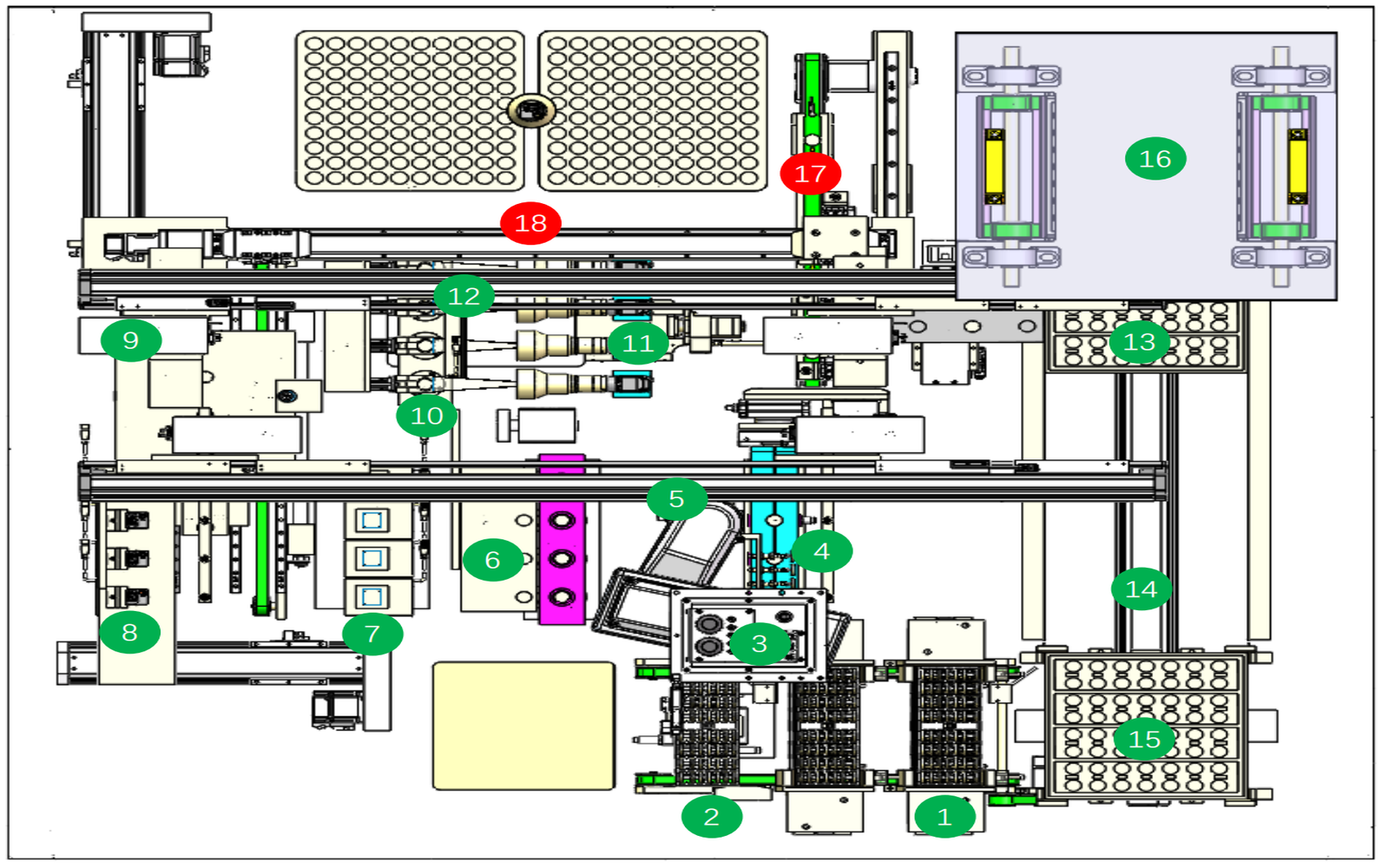
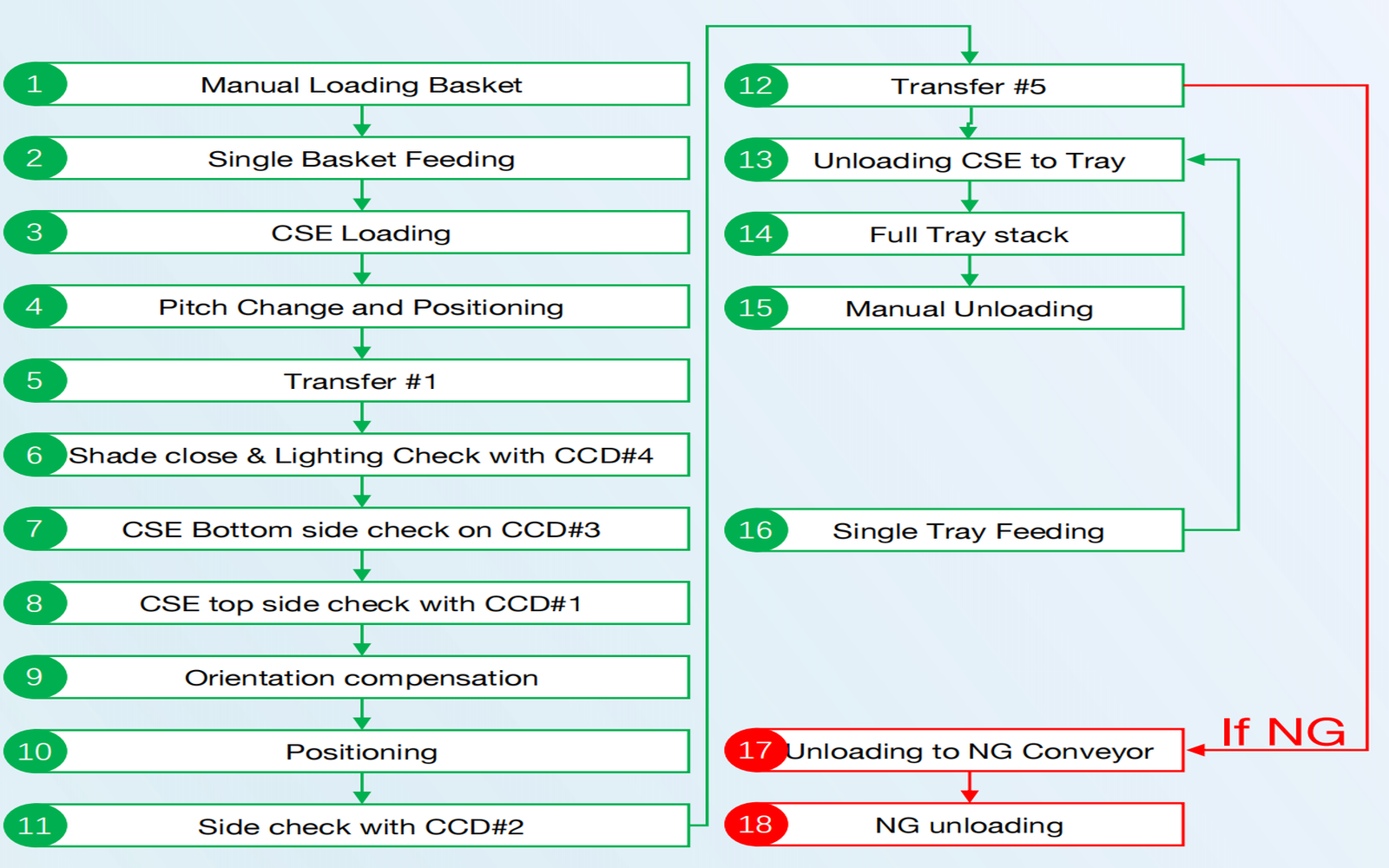
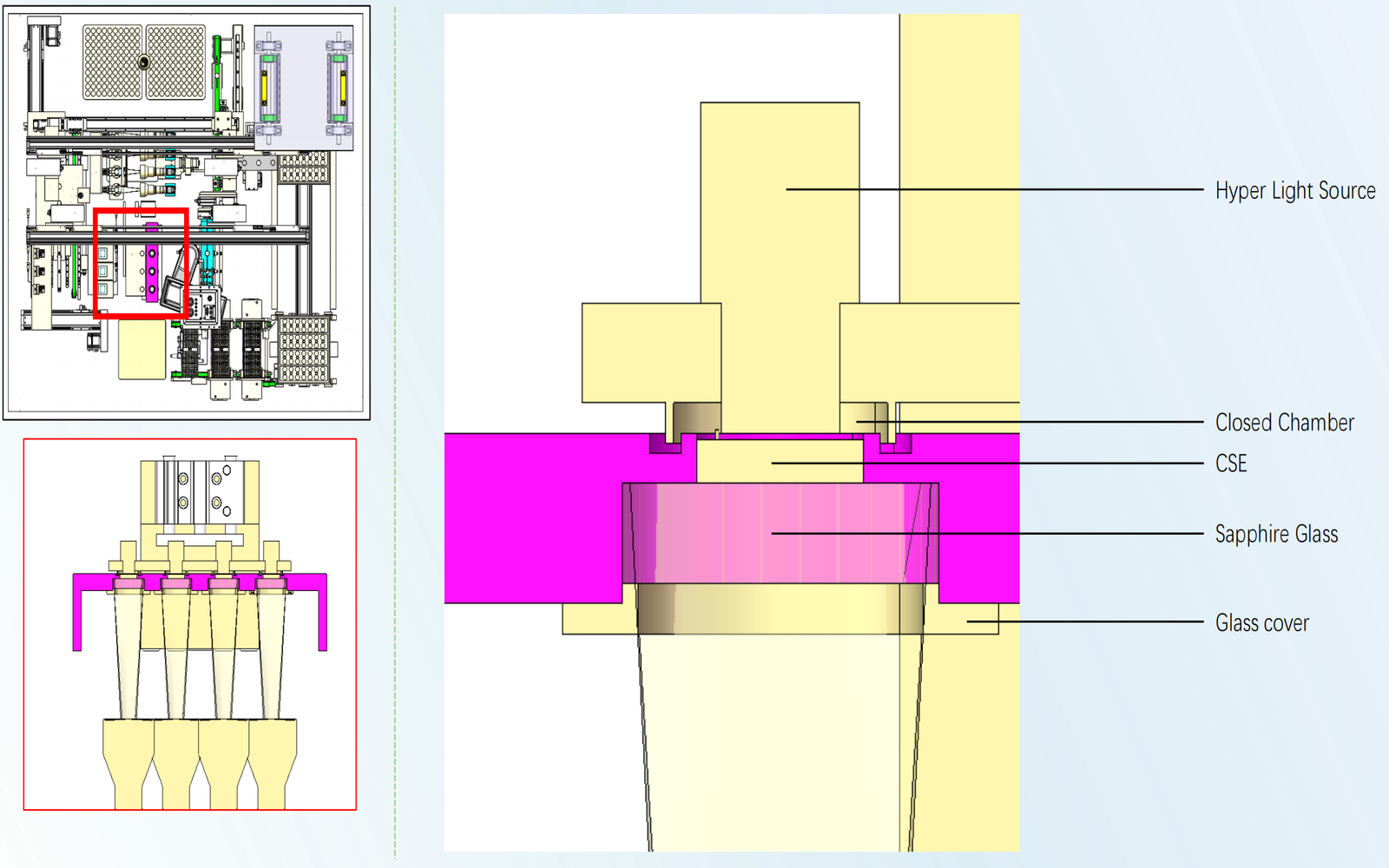
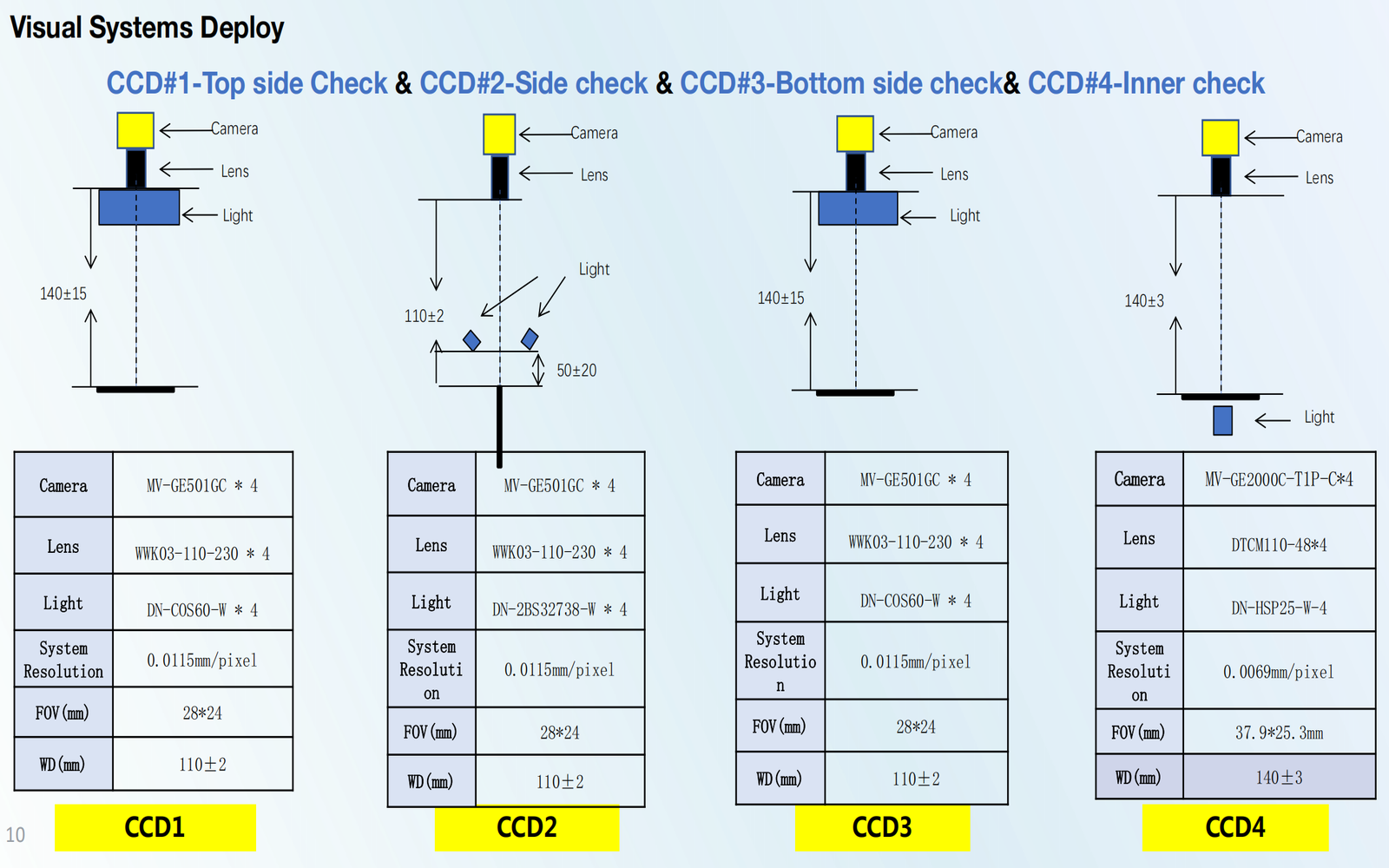
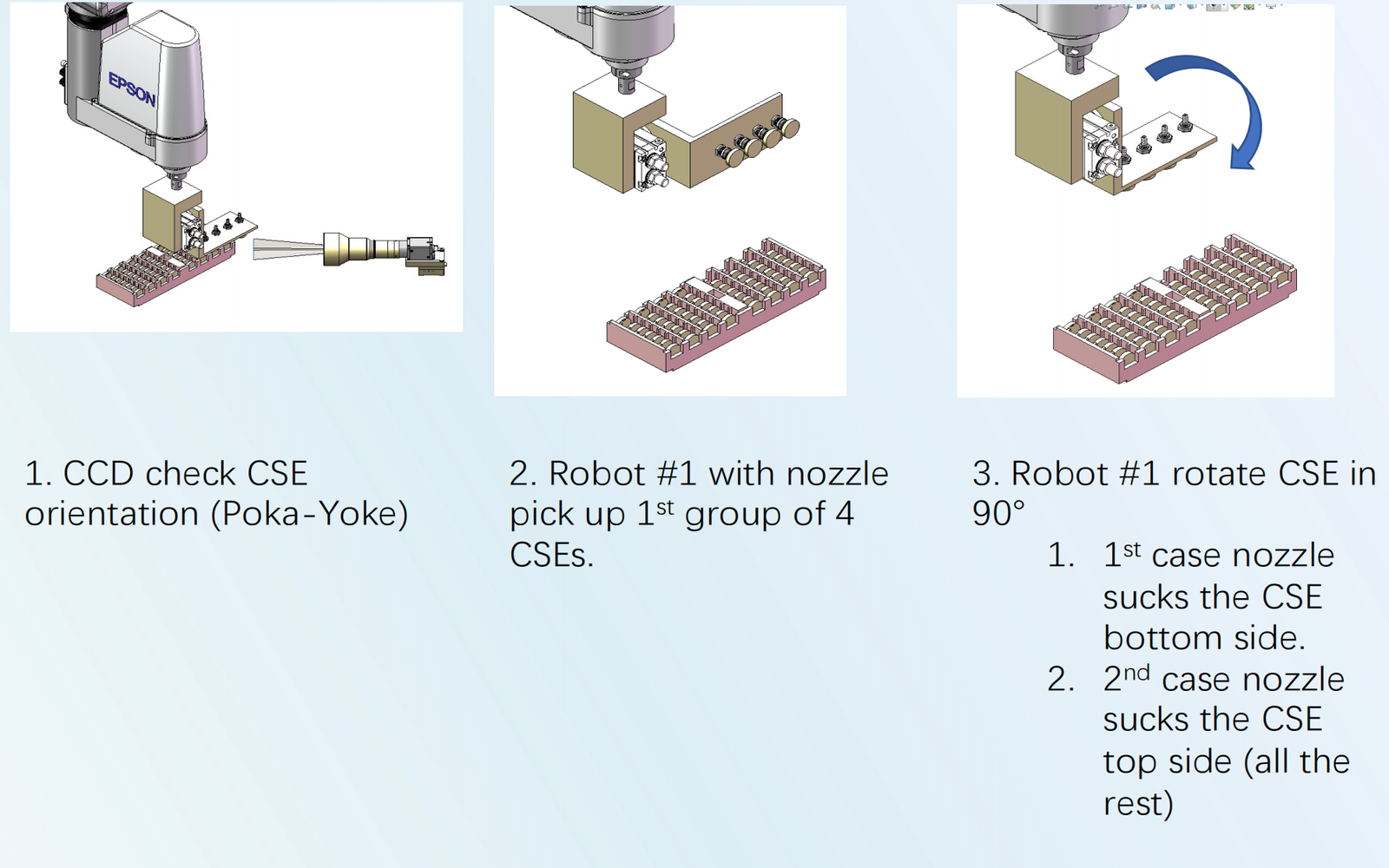
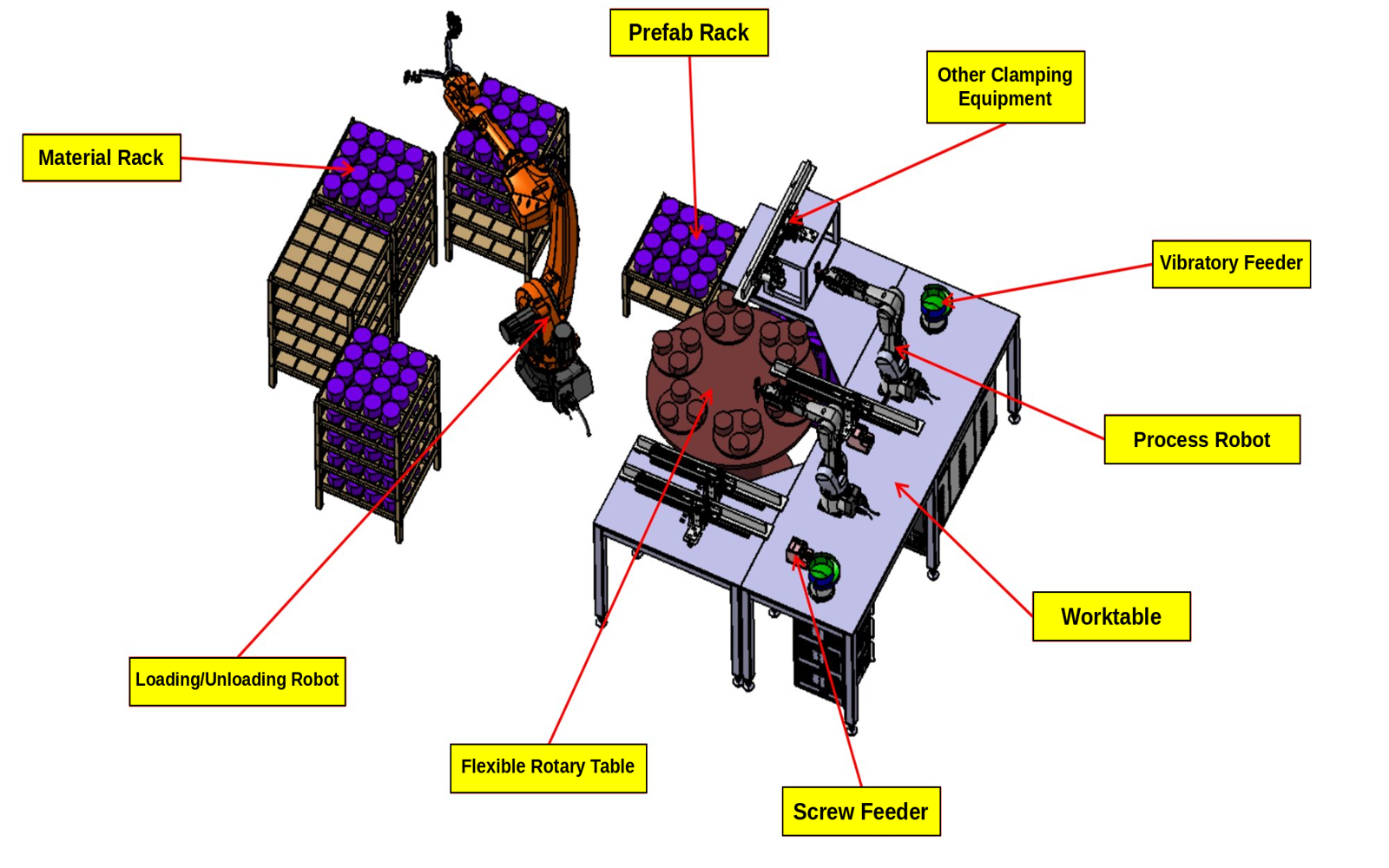
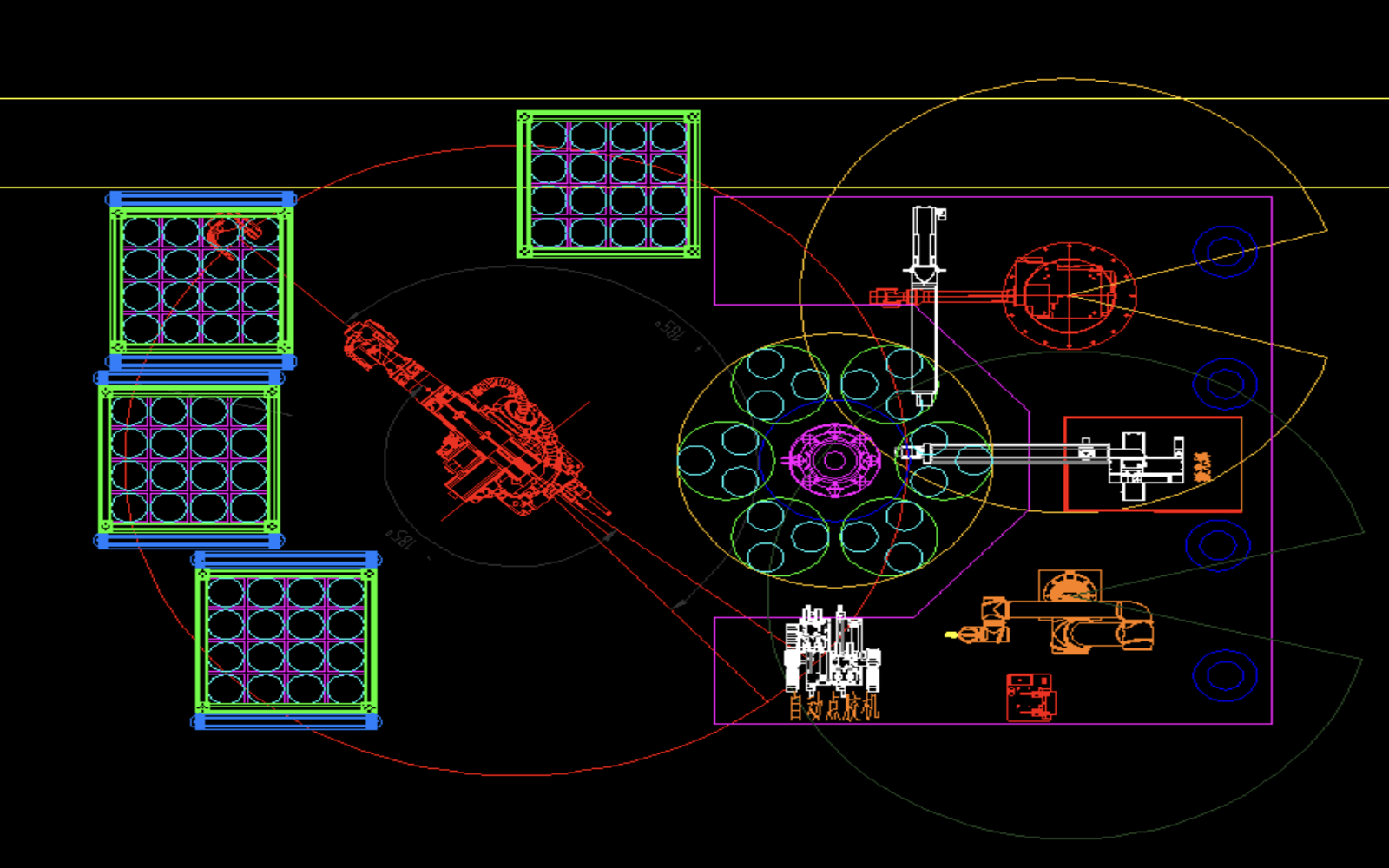
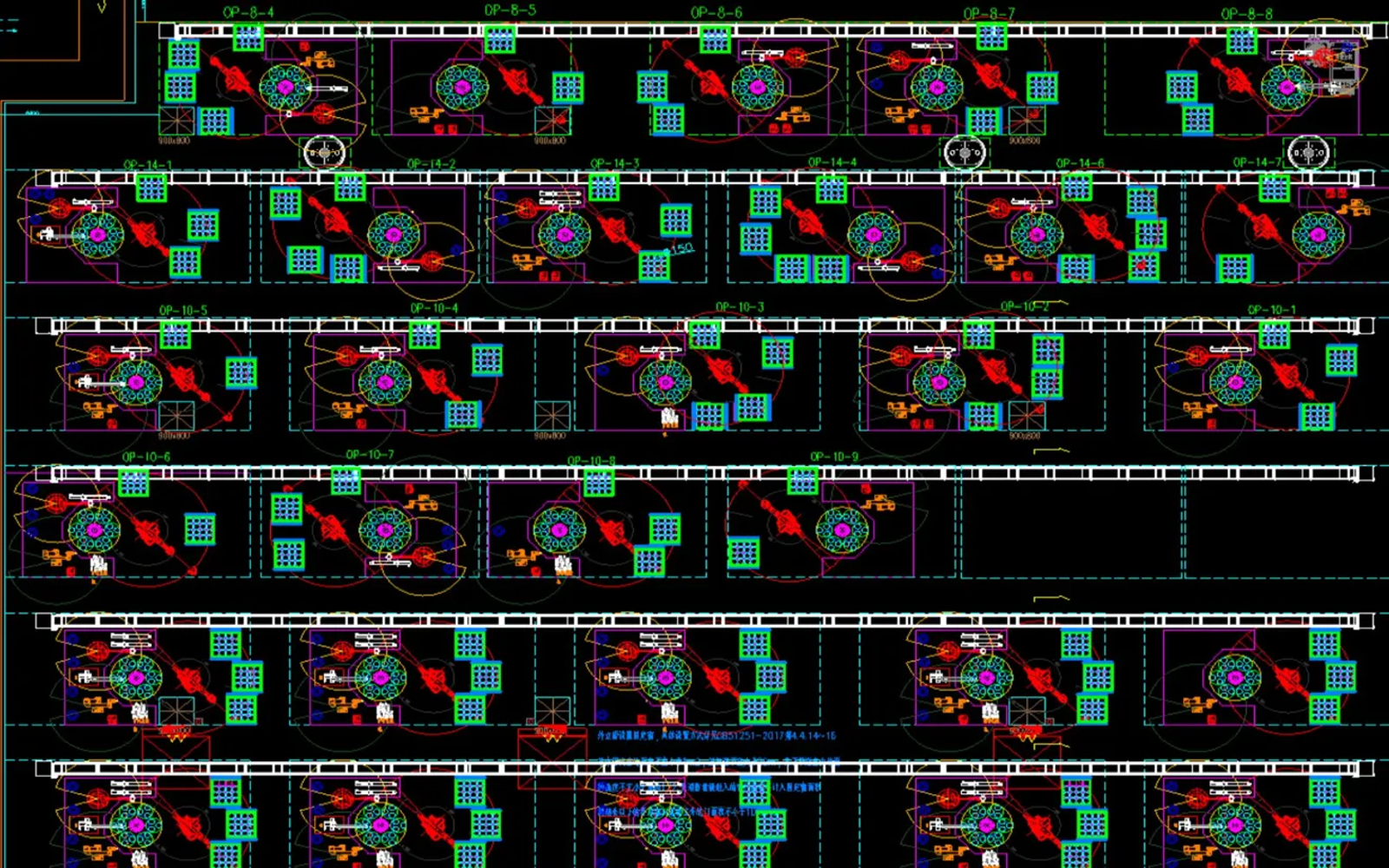
On the industry side, I built production robotics and automation systems. At Dinnar Automation, I designed automated optical inspection (AOI) equipment for Texas Instruments semiconductor products. At CloudMinds Robotics, I co-designed standardized multi-robot assembly workstations for harmonic-reducer production, with EtherCAT real-time control and digital-twin systems. At NIO Automobile, I developed sim-to-real transfer pipelines for autonomous driving.